Um robô, que tem um imã em sua base, se desloca sobre a superfície externa de um cubo metálico, ao longo de segmentos de reta cujas extremidades são pontos médios de arestas e centros de faces. Ele inicia seu deslocamento no ponto P, centro da face superior do cubo, segue para o centro da próxima face, converte à esquerda e segue para o centro da seguinte, converte à direita e continua sua movimentação, sempre alternado entre conversões à esquerda e à direita quando alcança o centro de uma face. O robô só termina sua movimentação quando retorna ao ponto P. A figura apresenta deslocamentos iniciais desse robô.
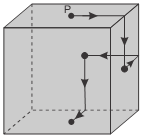
A projeção ortogonal do trajeto descrito por esse robô sobre o plano da base, após terminada sua movimentação, visualizada da posição em que se está enxergando esse cubo, é
Questões relacionadas
- Matemática | 14.1 Posição e Poliedros
No projeto de uma nova máquina, um engenheiro encomendou a um torneiro mecânico a fabricação de uma peça, obtida a partir do recorte em um cubo, como ilustrado na figura. Para isso, o torneiro forneceu, juntamente com o desenho tridimensional da peça, suas vistas frontal, lateral e superior, a partir das posições indicadas na figura. Para facilitar o trabalho do torneiro, as arestas dos cortes que ficam ocultos nas três vistas devem ser representadas por segmentos tracejados, quando for o caso.

As vistas frontal, lateral e superior que melhor representam o desenho entregue ao torneiro são
- Matemática | 09. Probabilidade
Uma fábrica de parafusos possui duas máquinas, I e II, para a produção de certo tipo de parafuso.
Em setembro, a máquina I produziu
 do total de parafusos produzidos pela fábrica. Dos parafusos produzidos por essa máquina,
do total de parafusos produzidos pela fábrica. Dos parafusos produzidos por essa máquina,  eram defeituosos. Por sua vez,
eram defeituosos. Por sua vez,  dos parafusos produzidos no mesmo mês pela máquina II eram defeituosos.
dos parafusos produzidos no mesmo mês pela máquina II eram defeituosos.O desempenho conjunto das duas máquinas é classificado conforme o quadro, em que P indica a probabilidade de um parafuso escolhido ao acaso ser defeituoso.
O desempenho conjunto dessas máquinas, em setembro, pode ser classificado como:
- Geografia | 6.3 Mineração
(FUVEST 2010 1ª FASE) Em se tratando de commodities, o Brasil tem papel relevante no mercado mundial, graças à exportação de minérios. Destacam-se os minérios de ferro e de manganês, bases
para a produção de aço, e a bauxita, da qual deriva o alumínio.
A relação entre minério e sua localização no território brasileiro está corretamente e respectivamente expressa em:
- Matemática | 1.7 Razão, Proporção e Regra de Três
O Índice de Massa Corporal, abreviadamente IMC, é uma medida internacional adotada pela Organização Mundial de Saúde (OMS) para indicar se uma pessoa está com “peso” excessivo para sua altura. O cálculo do IMC é dado pela fórmula IMC =
 , sendo m a massa da pessoa, medida em kg, e h a sua altura, em metros. Os valores da tabela foram ligeiramente adaptados com relação aos adotados pela OMS, para simplicidade nos cálculos.
, sendo m a massa da pessoa, medida em kg, e h a sua altura, em metros. Os valores da tabela foram ligeiramente adaptados com relação aos adotados pela OMS, para simplicidade nos cálculos.Assim, segundo a OMS, um indivíduo de 2,10 metros de altura que pesa 80 kg tem IMC inferior a 19, sendo classificado como “abaixo do peso”.
Se um indivíduo de 144 kg e 2 metros de altura perder 64 kg numa dieta, então este indivíduo migrará da classe
- Física | B. Trabalho, Potencial, Energia e Equilíbrio
(UNIFACS)
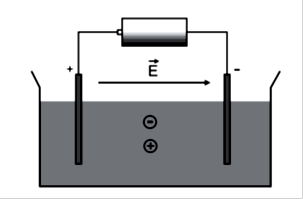
A maioria das sinapses dos mamíferos são de natureza química, mas existe uma forma simples de sinapse elétrica, que permite a transferência direta da corrente iônica de uma célula para outra. Uma análise da figura, que exemplifica o princípio da formação de uma corrente iônica, permite afirmar corretamente que