A figura a seguir indica as trajetórias de dois robôs, Sojourner e Opportunity, utilizados pela Agência Espacial Americana no projeto de exploração científica do planeta Marte. Considere que os dois robôs tenham partido, simultaneamente, de pontos distintos da superfície de Marte, com a mesma velocidade e em trajetória retilínea, em uma missão de exploração. Cada um dos robôs é controlado por um operador na Terra.
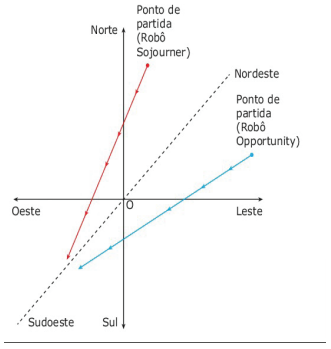
Sabe-se que o robô Sojourner intercepta a linha norte-sul a 4 km ao norte do ponto de referência O, e intercepta a linha leste-oeste a 2 km a oeste desse mesmo ponto de referência. Considerando-se que a trajetória do robô Opportunity seja simétrica à trajetória do robô Sojourner em relação à linha sudoeste-nordeste, e que não ocorram imprevistos que atrasem os robôs, pode-se afirmar que os mesmos irão se encontrar a, aproximadamente, (Considere: √2 ≅ 1,4)
Questões relacionadas
- Física
Galileu, em seu livro “Diálogo sobre os Dois Principais Sistemas do Mundo”, apresentou a independência dos movimentos para, entre outras coisas, refutar a imobilidade da Terra. Em um de seus exemplos, ele descreve o seguinte: imagine um canhão na posição horizontal sobre uma torre, atirando paralelamente ao horizonte. Não importa se a carga da pólvora é grande ou pequena, e o projétil caia a ou o tempo que os projéteis levam para chegar ao chão é o mesmo.
(Texto adaptado do Livro Diálogo sobre os dois Principais Sistemas do Mundo).
Em relação ao texto e à independência dos movimentos, julgue os itens abaixo:
I. o texto apresenta uma ideia errada, pois a bala de canhão que percorre o maior trajeto permanece por maior tempo no ar;
II. os tempos de lançamento das duas balas de canhão são os mesmos quando comparados ao tempo de queda de uma terceira bola que é abandonada da boca do canhão e cai até a base da torre;
III. o texto não apresenta uma ideia correta sobre o lançamento de projéteis, pois quanto maior a carga, maior o tempo que a bala de canhão permanece no ar;
IV. o movimento da bala de canhão pode ser dividido em dois movimentos independentes: um na vertical, e outro na horizontal.
Os seguintes itens são CORRETOS:
- Física
A força resultante que atua sobre um bloco de 2,5kg, inicialmente em repouso, aumenta uniformemente de zero até 100N em 0,2s, conforme a figura a seguir. A velocidade final do bloco, em m/s, é:

- Língua Portuguesa | 1.04 Inferência, Dedução ou Conclusão
Televisão x cinema
Mais uma vez, reacende-se o desgastante debate sobre “linguagem de televisão” e “linguagem de cinema”.
No mesmo país em que pagar ingresso ainda é luxo para milhões de pessoas, alguns críticos utilizam o termo “televisivo” para depreciar uma obra. E “cinematográfico” para enaltecê-la.
Como se houvesse um juiz onipotente a permitir ou não que se sinta uma história da maneira que se pretende senti-la.
Todos os sentidos ficam de fora da análise ignorante, tipicamente política, que divorcia a técnica da percepção sensorial. E é exatamente aí que reside o único interesse de um realizador: o momento do encontro do espectador com a obra.
MONJARDIM, J. O Globo, Rio de Janeiro, 24 set. 2004 (adaptado).
Ao comentar o ressurgimento do debate sobre “linguagem de televisão” e “linguagem de cinema”, o autor mostra a:
- Língua Portuguesa - Fundamental | 08. Verbo
Texto base: A questão refere-se ao período (frase que possui uma ou mais orações) descrito a seguir. Leia-o e observe-o com atenção. "Se caminhar fizesse bem, o carteiro seria IMORTAL." Fonte: http://www.belasmensagens.com.br/frases-engracadas.php - 28/10/2009 - adaptado.
Enunciado:
Por modo subjuntivo constituir um termo verbal que não expressa certeza e sim uma dúvida (algo que pode acontecer), identificamos, no período acima, conjugação na terceira pessoa do singular, no pretérito imperfeito do subjuntivo, o verbo
- Sociologia | 2. Diversidade Cultural e Estratificação Social
(Fuvest)
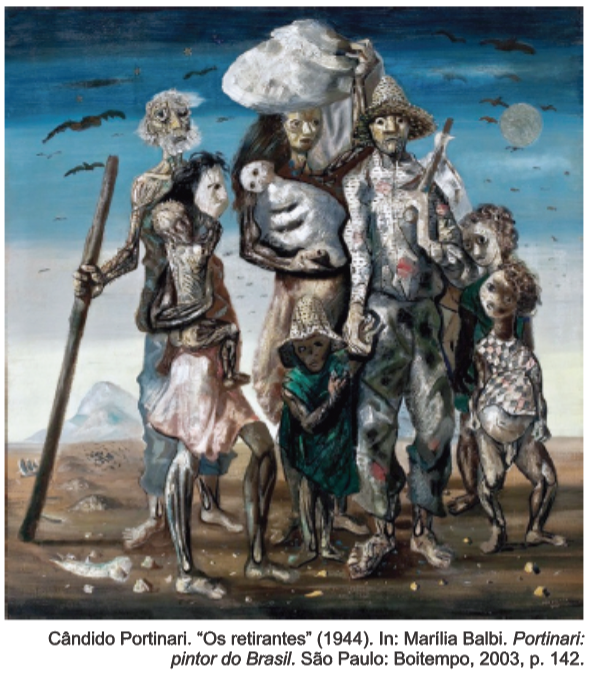
Identifique a alternativa mais adequada para expressar as relações entre arte e sociedade no quadro: